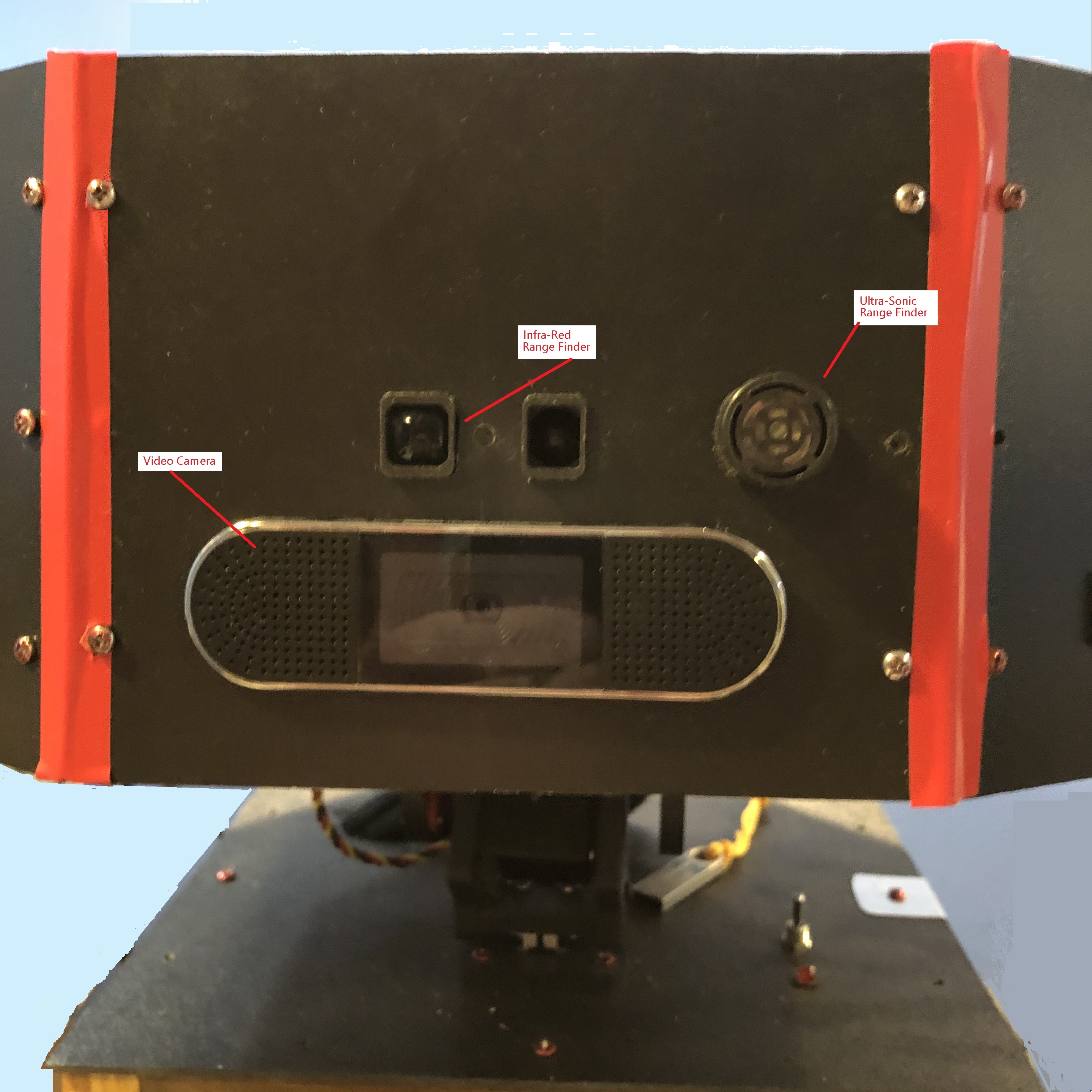
Video Camera, Ultra-sonic range finder and an I.R. range finder.
U.S. = Ultra-Sonic
I.R. = Infra-Red
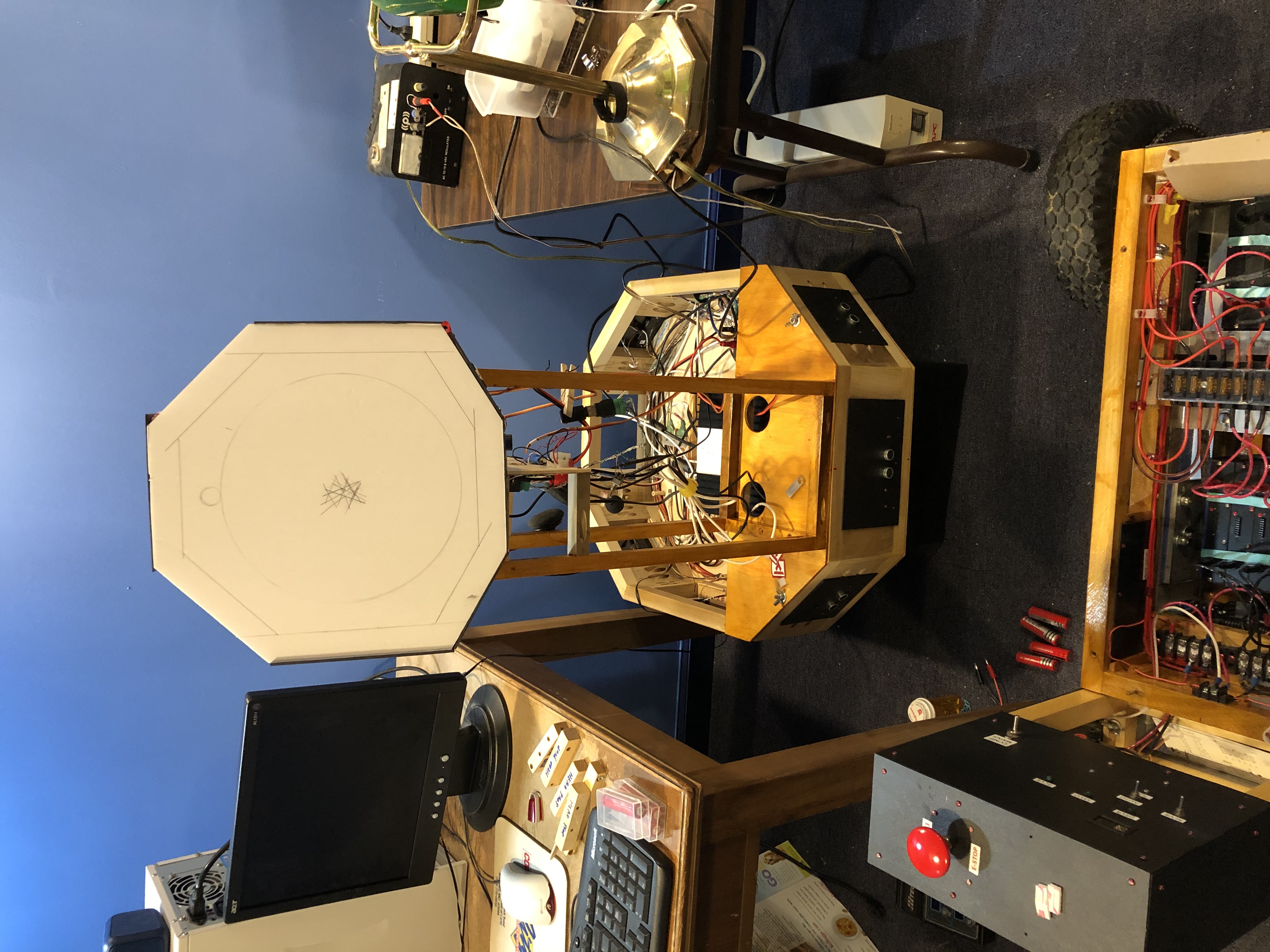
Zoe's head is mounted atop a Servo city SPT200 Pan & Tilt kit
Available at https://www.servocity.com/spt200-pan-tilt-kit/
Zoe's head is moved by Hitec Servos part number HS-645MG
The powerful HS-645MG is one of Hitec’s most popular servos. It’s the perfect choice for those larger sport planes or monster trucks and buggies requiring a durable high torque servo. Featuring their unique M/P and metal gear train technology, the HS-645MG offers one of the strongest gear trains available in any servo.
I wanted places to mount 8, I.R. sensors, but not exactly at 45 degree increments.
This shows the top of Zoe's head, before paint. Her nose is pointed downward.

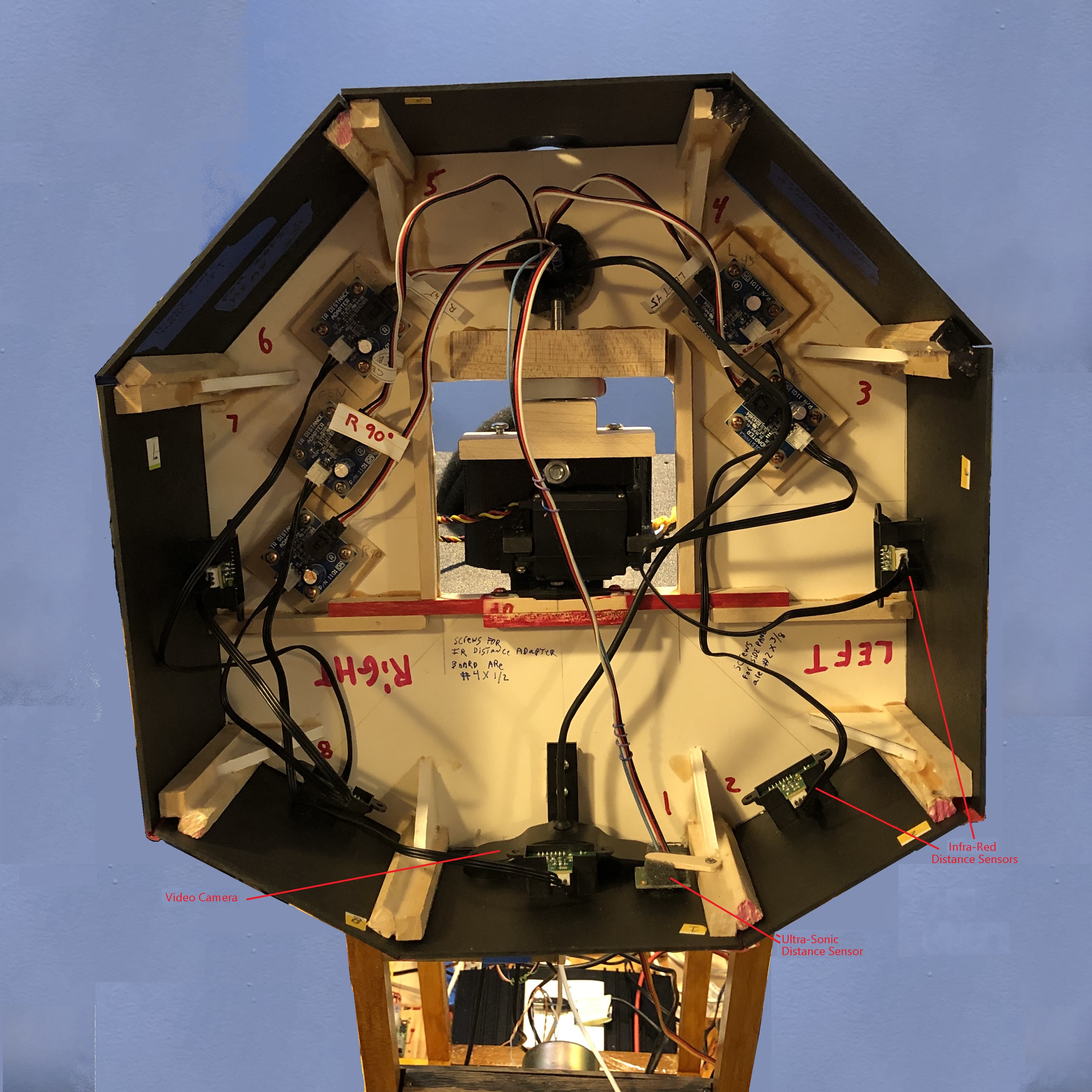
Inside the head are wires for the I.R. sensors, the Video Camera and an ultrasonic sensor.
I'm going to try mounting a GPS receiver in the head also.
The software may be able to move the head to obtain a better GPS signal.
The head is mounted on a 3 axis, (pan / tilt / wobble) mechanism - with servos controlled by the computer.
The "Head/Neck" servos are NOT controlled by the R/C receiver. The robots software controls the head based on items detected by the sensors, or the software will move the head to point the camera or sensors to check the robots path, or to indicate confusion. (head wobble)